
Vikingský program - Viking program
 Umělecký dojem z vikingského orbiteru uvolňujícího přistávací kapsli
| |
| Výrobce | Laboratoř tryskového pohonu / Martin Marietta |
|---|---|
| Země původu | Spojené státy |
| Operátor | NASA / JPL |
| Aplikace | Mars orbiter/lander |
| Specifikace | |
| Spustit hmotu | 3527 kilogramů (7776 liber) |
| Napájení | Orbitery: 620 wattů ( solární pole ) Lander: 70 wattů (dvě jednotky RTG ) |
| Režim | Areocentrický |
| Designový život | Orbitery: 4 roky na Marsu Landers: 4–6 let na Marsu |
| Rozměry | |
| Výroba | |
| Postavení | V důchodu |
| Postavený | 2 |
| Spuštěno | 2 |
| V důchodu |
Viking 1 orbiter 17. srpna 1980 Viking 1 lander 20. července 1976 (přistání) do 13. listopadu 1982 Viking 2 orbiter 25. července 1978 Viking 2 lander 3. září 1976 (přistání) do 11. dubna 1980 |
| První spuštění |
Viking 1. srpna 20, 1975 |
| Poslední spuštění |
Viking 2 09.09.1975 |
Program Viking sestával z dvojice identických amerických družic , Viking 1 a Viking 2 , který dosedl na Marsu v roce 1976. Každá sonda se skládá ze dvou hlavních částí: družici navržený k fotografii povrchu Marsu z oběžné dráhy , a lander navržen ke studiu planety z povrchu. Orbitery také sloužily jako komunikační relé pro landery, jakmile přistály.
Program Viking vyrostl z dřívějšího, ještě ambicióznějšího programu Voyager Mars NASA , který nesouvisel s úspěšnými sondami hlubokého vesmíru Voyager z konce 70. let minulého století. Viking 1 byl vypuštěn 20. srpna 1975 a druhé plavidlo Viking 2 bylo vypuštěno 9. září 1975, oba jezdili na raketách Titan IIIE s horními stupni Centaur . Viking 1 vstoupil na oběžnou dráhu Marsu 19. června 1976, Viking 2 následoval 7. srpna.
Po více než měsíci obíhání Marsu a vrácení snímků použitých pro výběr místa přistání se orbitery a přistávací moduly odpojily; přistávači poté vstoupili do atmosféry Marsu a přistáli na místech, která byla vybrána. Viking 1 Přistávací modul přistál na povrchu Marsu dne 20. července 1976, více než dva týdny před Viking 2 ' s příjezdem na oběžné dráze. Viking 2 pak úspěšně soft-přistál na září 3. orbiters pokračoval zobrazování a provádění dalších vědeckých operací z oběžné dráhy, zatímco landers nasazení nástroje na povrchu.
Náklady na projekt činily v době zahájení zhruba 1 miliardu dolarů, což odpovídá asi 5 miliardám USD v 2019 dolarech. Mise byla považována za úspěšnou a připisuje se jí pomoc při utváření většiny znalostí o Marsu na konci devadesátých a na počátku dvacátých let minulého století.
Vědecké cíle
- Získejte obrázky povrchu Marsu ve vysokém rozlišení
- Charakterizujte strukturu a složení atmosféry a povrchu
- Hledejte důkazy o životě na Marsu
Vikingští orbitéři
Primárním cílem těchto dvou vikingských orbiterů bylo transportovat přistávací moduly na Mars, provádět průzkum s cílem lokalizovat a certifikovat místa přistání, fungovat jako komunikační relé pro přistávací moduly a provádět vlastní vědecká zkoumání. Každý orbiter, založený na dřívější kosmické lodi Mariner 9 , byl osmiúhelník o průměru přibližně 2,5 m. Plně poháněný pár orbiter-lander měl hmotnost 3527 kg. Po oddělení a přistání měl přistávací modul hmotnost asi 600 kg a orbiter 900 kg. Celková startovací hmotnost byla 2328 kg, z čehož 1445 kg tvořil hnací plyn a plyn pro řízení polohy . Osm tváří prstencové struktury bylo 0,4572 m vysoké a bylo střídavě 1,397 a 0,508 m široké. Celková výška byla 3,29 m od upevňovacích bodů přistávacího modulu na dně k upevňovacím bodům nosné rakety nahoře. K dispozici bylo 16 modulárních oddílů, 3 na každém ze 4 dlouhých obličejů a jeden na každém krátkém obličeji. Čtyři křídla solárních panelů se táhla od osy orbiteru, vzdálenost od špičky ke špičce dvou opačně prodloužených solárních panelů byla 9,75 m.
Pohon
Hlavní pohonná jednotka byla namontována nad autobusem orbiter . Pohon byl vybaven pomocí bipropellant ( monomethylhydrazinu a kysličníku dusičitého ) kapalné palivo raketového motoru , které by mohly být kardanových až 9 stupňů . Motor byl schopen tahu 1 323 N (297 lbf ), což poskytlo změnu rychlosti 1480 m/s . Kontrola postoje byla dosažena 12 malými tryskami stlačeného dusíku.
Akviziční sluneční senzor , tempomatový sluneční senzor, hvězdný tracker Canopus a setrvačná referenční jednotka sestávající ze šesti gyroskopů umožňovaly tříosou stabilizaci. Na palubě byly také dva akcelerometry . Komunikace probíhala prostřednictvím 20 W vysílače v pásmu S (2,3 GHz ) a dvou 20 W TWTA . Byl také přidán downlink v pásmu X (8,4 GHz) speciálně pro radiotechniku a provádění komunikačních experimentů. Uplink bylo přes pásmo S (2,1 GHz). Na jednom okraji základny orbiteru byla připevněna dvouosá řiditelná parabolická parabolická anténa o průměru přibližně 1,5 m a z horní části sběrnice vyčnívala pevná anténa s nízkým ziskem. Dva magnetofony byly schopné uložit 1280 megabitů . K dispozici bylo také reléové rádio 381 MHz .
Napájení
Napájení dvou orbitálních plavidel zajišťovalo osm solárních panelů o rozměrech 1,57 × 1,23 m , dva na každém křídle. Solární panely obsahovaly celkem 34 800 solárních článků a produkovaly 620 W energie na Marsu. Síla byla také uložena ve dvou nikl-kadmium 30- A · h baterií .
Kombinovaná plocha čtyř panelů byla 15 metrů čtverečních (160 čtverečních stop) a poskytovaly regulovaný i neregulovaný stejnosměrný výkon; rádiovému vysílači a přistávacímu modulu byla poskytnuta neregulovaná energie.
Dvě 30-ampér-hodinové, nikl-kadmiové, dobíjecí baterie poskytovaly energii, když kosmická loď nebyla obrácena ke Slunci, během startu, při provádění korekčních manévrů a také během zákrytu Marsu.
Hlavní zjištění

Objevením mnoha geologických forem, které se obvykle vytvářejí z velkého množství vody, způsobily obrázky z oběžných drah revoluci v našich představách o vodě na Marsu . V mnoha oblastech byla nalezena obrovská říční údolí. Ukázali, že záplavy vody prorazily přehrady, vytesaly hluboká údolí, nahlodaly rýhy do skalního podloží a urazily tisíce kilometrů. Velké oblasti na jižní polokouli obsahovaly rozvětvené sítě toků, což naznačuje, že kdysi pršelo. Předpokládá se, že boky některých sopek byly vystaveny srážkám, protože se podobají těm způsobeným na havajských sopkách. Mnoho kráterů vypadá, jako by nárazové těleso spadlo do bláta. Když se vytvořily, led v půdě možná roztál, proměnil zemi v bláto a poté stékal po povrchu. Obvykle materiál při nárazu stoupá, pak klesá. Neteče po povrchu, obchází překážky, jako na některých marťanských kráterech. Regiony zvané „ Chaotický terén “ jako by rychle ztratily velké množství vody, což způsobilo vznik velkých kanálů. Množství zapojené vody se odhadovalo na deset tisícnásobek toku řeky Mississippi . Podzemní vulkanismus mohl roztát zmrzlý led; voda poté odtékala a země se zhroutila a zanechala chaotický terén.

Zjednodušené ostrovy ukazují, že na Marsu došlo k velkým povodním.
( Čtyřúhelník Lunae Palus )
Čisticí vzory byly vytvářeny tekoucí vodou. Kráter Dromore je dole.
( Čtyřúhelník Lunae Palus )
Velké záplavy vody pravděpodobně nahlodaly kanály kolem kráteru Dromore .
( Čtyřúhelník Lunae Palus )
Ostrovy ve tvaru slzy vytesané záplavovými vodami z Ares Vallis .
( Čtyřúhelník Oxia Palus )
Obrázek tří údolí: Vedra Valles , Maumee Valles a Maja Valles .
( Čtyřúhelník Lunae Palus )
Kráter Arandas může být na vrcholu velkého množství vodního ledu, který se roztavil, když došlo k nárazu, a vytvořil bahenní ejecta.
( Čtyřúhelník Mare Acidalium )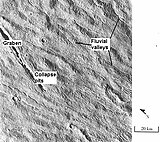
Kanály procházející Alba Mons .
( Čtyřúhelník Arcadia )
Rozvětvené kanály v čtyřúhelníku Thaumasia poskytují možný důkaz o minulém dešti na Marsu.
Tyto rozvětvené kanály poskytují možný důkaz o minulém dešti na Marsu. ( Čtyřúhelník Margaritifer Sinus )

Ravi Vallis vznikl pravděpodobně kvůli extrémním záplavám.
( Čtyřúhelník Margaritifer Sinus )










Vikingští přistávači

Každý přistávací modul obsahoval šestistrannou hliníkovou základnu s alternativními dlouhými stranami 1,09 a 0,56 m (3 ft 7 in a 1 ft 10 in), podepřenou na třech prodloužených nohách připevněných ke kratším stranám. Nožní podložky tvořily vrcholy rovnostranného trojúhelníku s 2,21 m (7 ft 3 v) stranami při pohledu shora, přičemž dlouhé strany základny vytvářely přímku se dvěma sousedními podložkami. Přístrojové vybavení bylo připevněno uvnitř a nahoře na základně, zvýšeno nad povrch prodlouženými nohami.
Každý přistávací modul byl uzavřen v tepelném štítu aeroshell určeném ke zpomalení přistávacího modulu během vstupní fáze. Aby se zabránilo kontaminaci Marsu zemskými organismy, byl každý přistávací modul po sestavení a uzavření uvnitř aeroskoly uzavřen v tlakovém „bioshieldu“ a poté sterilizován při teplotě 111 ° C (232 ° F) po dobu 40 hodin. Z tepelných důvodů bylo víčko biologického štítu odhozeno poté, co horní stupeň Centaur poháněl kombinaci Viking orbiter/lander z oběžné dráhy Země.
Vstup, sestup a přistání (EDL)
Každý přistávací modul dorazil na Mars připojený k orbiteru. Shromáždění obíhalo kolem Marsu mnohokrát, než byl přistávací modul vypuštěn a oddělen od orbiteru pro sestup na povrch. Sestup sestával ze čtyř odlišných fází, počínaje popáleninou deorbitů . Přistávací modul poté zaznamenal atmosférický vstup se špičkovým ohřevem, ke kterému došlo několik sekund po zahájení třecího ohřevu s atmosférou Marsu. Ve výšce asi 6 kilometrů (3,7 míle) a cestování rychlostí 900 kilometrů za hodinu (600 mph) se padák rozvinul, aeroskola se uvolnila a přistávaly nohy. Ve výšce asi 1,5 kilometru (5 000 stop) přistávací modul aktivoval tři retro motory a byl vypuštěn z padáku. Přistávací modul poté okamžitě použil retrorocket, aby zpomalil a kontroloval svůj sestup, s měkkým přistáním na povrchu Marsu.

Při přistání (po použití raketového pohonu) měli přistávači hmotnost asi 600 kg.
Pohon
Pohon pro deorbit byla poskytována monopropellant hydrazin (N 2 H 4 ), a to prostřednictvím rakety s 12 tryskami uspořádány ve čtyř skupin po třech, která poskytla 32 newtonů (7,2 lb f ) tahu, překládat na změny v rychlosti 180 m / s (590 ft/s). Tyto trysky také fungovaly jako řídicí trysky pro translaci a otáčení přistávacího modulu.
Koncový sestup (po použití padáku ) a přistání využily tři (jeden připevněný na každé dlouhé straně základny, oddělený 120 stupni) hydroponických motorů s monopropellantem. Motory měly 18 trysek, které rozptýlily výfukové plyny a minimalizovaly dopady na zem, a byly škrticí od 276 do 2 667 newtonů (62 až 600 lb f ). Hydrazin byl čištěn, aby se zabránilo kontaminaci povrchu Marsu mikroby Země . Přistávací modul nesl 85 kg (187 lb) paliva při startu, obsažený ve dvou sférických titanových nádržích namontovaných na opačných stranách přistávacího modulu pod čelními skly RTG, což dávalo celkovou startovací hmotnost 657 kg (1448 lb). Ovládání bylo dosaženo pomocí setrvačné referenční jednotky , čtyř gyroskopů , radarového výškoměru , terminálního sestupu a přistávacího radaru a ovládacích trysek.
Napájení
Napájení zajišťovaly dvě jednotky radioizotopového termoelektrického generátoru (RTG) obsahující plutonium-238 připevněné k opačným stranám základny přistávacího modulu a zakryté větrnými clonami. Každý Viking RTG měl 28 cm (11 palců) na výšku, 58 cm (23 palců) v průměru, měl hmotnost 13,6 kg (30 liber) a poskytoval nepřetržitý výkon 30 W při 4,4 voltu. Čtyři vlhké buněčné utěsněna nikl-kadmiové 8 Ah (28,800 Přívěseky ), 28 voltové dobíjecí baterie byly také na palubě zvládnout špičkový výkon zatížení.
Užitečné zatížení

Komunikace probíhala prostřednictvím 20wattového vysílače v pásmu S pomocí dvou trubic s pohyblivou vlnou . Dvouosá řiditelná parabolická anténa s vysokým ziskem byla namontována na výložník poblíž jednoho okraje základny landeru. Všesměrová s nízkým ziskem S-band anténa také rozšířena ze základny. Obě tyto antény umožňovaly komunikaci přímo se Zemí, což Vikingovi 1 umožňovalo pokračovat v práci dlouho poté, co oba orbitery selhaly. UHF (381 MHz), anténa za předpokladu, jednosměrnou relé pro orbiter použití 30 W relé rádiu. Ukládání dat bylo na 40 Mbit magnetofon a přistávací počítač měl paměť 6000 slov pro příkazové pokyny.
Lander nesl nástroje k dosažení primárních vědeckých cílů mise landera: studovat biologii , chemické složení ( organické a anorganické ), meteorologii , seismologii , magnetické vlastnosti, vzhled a fyzikální vlastnosti povrchu a atmosféry Marsu. Dvě 360stupňové válcové skenovací kamery byly namontovány poblíž jedné dlouhé strany základny. Ze středu této strany se prodloužilo rameno vzorkovače s hlavou kolektoru, teplotním senzorem a magnetem na konci. Meteorologie boom, skladovací teplota, směr větru a vítr senzory rychlosti prodloužena ven a nahoru z horní části jedné z přistávacího modulu nohou. Seismometr , magnet a kamera testovací cíle a zvětšovací zrcadlo jsou namontovány naproti kamery, v blízkosti vysoce anténou. Biologický experiment a hmotnostní spektrometr s plynovým chromatografem obsahoval vnitřní ekologicky kontrolovaný oddíl . Do struktury byl také namontován rentgenový fluorescenční spektrometr. Tlakový snímač byl připojen pod lander těla. Vědecké užitečné zatížení mělo celkovou hmotnost přibližně 91 kg (201 lb).
Biologické experimenty
Vikingští přistávači prováděli biologické experimenty určené k detekci života na marťanské půdě (pokud existovala) s experimenty navrženými třemi samostatnými týmy pod vedením hlavního vědce Geralda Soffena z NASA. Jeden experiment byl pozitivní pro detekci metabolismu (současný život), ale na základě výsledků dalších dvou experimentů, které nedokázaly odhalit žádné organické molekuly v půdě, většina vědců nabyla přesvědčení, že pozitivní výsledky byly pravděpodobně způsobeny nebiologickými chemické reakce z vysoce oxidujících půdních podmínek.

Ačkoli během mise NASA prohlásila, že výsledky přistání Vikingů neprokázaly přesvědčivé biosignatury v půdách na dvou přistávacích místech, výsledky testů a jejich omezení jsou stále předmětem hodnocení. Platnost pozitivních výsledků „Labeled Release“ (LR) zcela závisí na absenci oxidačního činidla v marťanské půdě, ale jeden byl později objeven přistávačem Phoenix ve formě chloristanových solí. Bylo navrženo, že organické sloučeniny mohly být přítomny v půdě analyzované jak Vikingem 1, tak Vikingem 2 , ale zůstaly bez povšimnutí kvůli přítomnosti chloristanu, jak zjistil Phoenix v roce 2008. Vědci zjistili, že chloristan zničí organické látky při zahřátí a bude produkovat chlormethan a dichlormethan , identické sloučeniny chloru objevené oběma vikingskými landery, když prováděli stejné testy na Marsu.
Otázka mikrobiálního života na Marsu zůstává nevyřešena. Nicméně, 12. dubna 2012, Mezinárodní tým vědců různých studií, na základě matematické spekulace díky složitosti analýzy ze značených verzi experimentů z roku 1976 Viking mise, které by mohly naznačovat detekci „existující mikrobiálního života na Marsu.“ V roce 2018 byla navíc zveřejněna nová zjištění z opětovného přezkoumání výsledků hmotnostního spektrometru s plynovým chromatografem (GCMS).
Kamerový/zobrazovací systém
Vedoucím zobrazovacího týmu byl Thomas A. Mutch , geolog na Brownově univerzitě v Providence na Rhode Islandu . Fotoaparát pomocí pohyblivého zrcátka osvětluje 12 fotodiod. Každá z 12 křemíkových diod je navržena tak, aby byla citlivá na různé frekvence světla. Několik diod je umístěno tak, aby přesně zaostřovaly ve vzdálenostech šest až 43 stop od přistávacího modulu.
Kamery skenovaly rychlostí pět svislých skenovacích řádků za sekundu, každá složená z 512 pixelů. 300 stupňové panoramatické snímky byly složeny z 9 150 řádků. Skenování kamer bylo dostatečně pomalé, takže při záběru posádky pořízeném během vývoje zobrazovacího systému se několik členů několikrát ukázalo v záběru, když se při skenování kamery pohybovali.
Řídicí systémy
Vikingští přistávači používali naváděcí, řídicí a sekvenční počítač (GCSC) skládající se ze dvou 24bitových počítačů Honeywell HDC 402 s 18K paměti s plátovaným drátem , zatímco vikingské orbitery používaly počítačový subsystém Command Command (CCS) pomocí dvou na míru navržených 18 -bitové sériové procesory.
Finanční náklady na vikingský program
Oba orbitery stojí v té době 217 milionů USD (v té době), což je zhruba 1 miliarda USD v dolarech roku 2019. Nejdražší jednotlivou částí programu byla jednotka detekce života landera, která tehdy stála asi 60 milionů nebo 300 milionů USD v roce 2019. Vývoj designu vikingského landeru stál 357 milionů USD. To bylo desítky let předtím, než NASA využila přístup „rychlejší, lepší, levnější“, a Viking potřeboval propagovat bezprecedentní technologie pod národním tlakem vyvolaným studenou válkou a následkem vesmírné rasy , to vše pod vyhlídkou možného objevení mimozemského života poprvé čas. Experimenty musely dodržovat speciální směrnici z roku 1971, která nařizovala, aby žádná jediná porucha nezastavila návrat více než jednoho experimentu - obtížný a nákladný úkol pro zařízení s více než 40 000 součástmi.
Vikingský kamerový systém stál vývoj 27,3 milionu USD, což je zhruba 100 milionů v roce 2019. Když byl návrh zobrazovacího systému dokončen, bylo obtížné najít někoho, kdo by dokázal vyrobit jeho pokročilý design. Programoví manažeři byli později chváleni za to, že odrazili tlak na jednodušší a méně vyspělý zobrazovací systém, zvláště když se objevily názory. Program však ušetřil nějaké peníze tím, že vyřízl třetí přistávací modul a omezil počet experimentů na přistávacím modulu .
Celkově NASA uvádí, že na program bylo vynaloženo 1 miliardu USD v 70. letech 20. století, což je po úpravě inflace na 2019 dolarů asi 5 miliard USD.
Konec mise
Celé plavidlo nakonec selhalo, jedno po druhém, následovně:
| Řemeslo | Den příjezdu | Datum uzavření | Provozní životnost | Příčina selhání |
|---|---|---|---|---|
| Viking 2 orbiter | 07.08.1976 | 25. července 1978 | 1 rok, 11 měsíců, 18 dní | Po úniku paliva v pohonném systému vypněte. |
| Viking 2 lander | 03.09.1976 | 11. dubna 1980 | 3 roky, 7 měsíců, 8 dní | Vypněte po poruše baterie. |
| Viking 1 orbiter | 19. června 1976 | 17. srpna 1980 | 4 roky, 1 měsíc, 19 dní | Vypněte po vyčerpání paliva pro řízení polohy . |
| Viking 1 přistávací modul | 20. července 1976 | 13. listopadu 1982 | 6 let, 3 měsíce, 22 dní | Vypnutí po lidské chybě během aktualizace softwaru způsobilo, že přistávací anténa vypadla, čímž se ukončilo napájení a komunikace. |
Vikingský program skončil 21. května 1983. Aby se zabránilo bezprostřednímu dopadu na Mars, byla oběžná dráha oběžné dráhy Viking 1 zvýšena 7. srpna 1980, než byla vypnuta o 10 dní později. Náraz a potenciální kontaminace povrchu planety je možná od roku 2019.
Viking 1 byla zjištěna Lander být asi 6 kilometrů od plánovaného místa přistání sondou Mars Reconnaissance Orbiter v prosinci 2006.
Artefakt zprávy
(Viz také Seznam mimozemských památníků a Kategorie: Artefakty zpráv )
Každý vikingský přistávací modul nesl malou tečku mikrofilmu se jmény několika tisíc lidí, kteří na misi pracovali. Několik dřívějších vesmírných sond neslo artefakty zpráv, například plaketu Pioneer a zlatou desku Voyager . Pozdější sondy nesly také pomníky nebo seznamy jmen, například rover Perseverance, který uznává téměř 11 milionů lidí, kteří se přihlásili, aby na misi uvedli jejich jména .
Umístění vikingských přistávacích modulů

Viz také
- Složení Marsu - Pobočka geologie Marsu
- Zvědavý rover
- ExoMars - program astrobiologie studující Mars
- Průzkum Marsu - přehled průzkumu Marsu
- Život na Marsu - Vědecká hodnocení mikrobiální obyvatelnosti Marsu
- Seznam misí na Mars - článek seznamu Wikipedie
- Seznam hornin na Marsu - Abecední seznam pojmenovaných hornin a meteoritů nalezených na Marsu
- Mariner 9 - Úspěšná robotická kosmická loď Mars z roku 1971
- Mars Science Laboratory - Robotická mise, která v roce 2012 nasadila na Mars rover Curiosity
- Mars Pathfinder - mise zahrnující první robotický rover operující na Marsu (1997)
- Norman L. Crabill
- Příležitostný rover
- Robotická kosmická loď - vesmírná loď bez posádky, obvykle pod telerobotickou kontrolou
- Průzkum vesmíru - objevování a průzkum vesmíru
- Duchovní rover
- Historie amerického průzkumu vesmíru na amerických známkách
Reference
Další čtení
externí odkazy
- NASA Mars Viking Mission
- Vikingská mise na Mars (NASA SP-334) archivována 7. srpna 2013 na stroji Wayback Machine
- Informační list Vikingského projektu Solar Views
- Vikingská mise na Mars archivována 16. července 2011 na videu Wayback Machine
- Schéma Vikinga a jeho letový profil
- Článek na webových stránkách společnosti Smithsonian Air and Space
- Projekt Viking Mars Missions Education and Preservation (VMMEPP)
- Online výstava VMMEPP